The traditional daily inspection of subway vehicles is mainly based on manual visual inspection. This inspection method has problems such as poor working environment, high labor intensity, easy fatigue of personnel at night, difficulty in manual inspection of bogies, inability to use the overhaul results for fault warning and statistical analysis etc., resulting in a large amount of wasted manpowerand time.
After entering the large-scale line network operation, the pursuit of higher maintenance efficiency, accuracy and reduction of repetitive workload is becoming increasingly urgent.
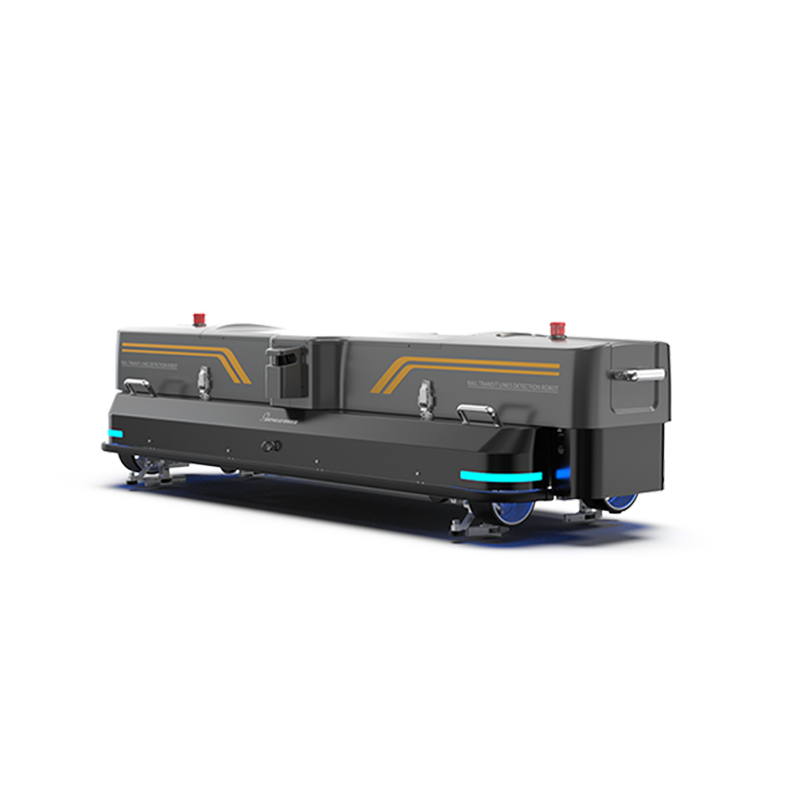
To solve the above problems, Shenhao Technology has developed the TVIS2000 train bottom inspection robot. This robot adopts advanced technologies such as autonomous navigation, Combined robotic arm with wheeled motion platform, HD optical imaging technology, image pattern recognition, AI deep learning algorithm, etc., which can carry out 2D or 3D high-definition imaging of key maintenance points under the vehicle and judge the abnormal state of key components under the vehicle intelligentily, realizing automatic detection, intelligent analysis and fault diagnosis of vehicle inspection.
In addition, Shenhao TVIS2000 train bottom inspection robot can also adapt to the collaborative work of multiple robot groups at the same time, which solves the shortcomings of the existing subway vehicle detection equipment, such as the inability to automatically switch tracks and the existence of detection blind spots. The average fault recognition rate is more than 98%.
The core functions of Shenhao TVIS2000 train bottom inspection robot are as follows:
▪Undertrain defect recognition
▪Train-side defect recognition
▪Defects intelligent positioning and alarm
▪Backend management system
▪Autonomous positioning and navigation
▪Autonomous transfer and charging
The “human-robot combination” maintenance mode not only solves the problems of fatigue, low efficiency, and instability in manual operations, but also ensures the safety and quality of maintenance operations. It provides technical support for the optimization and adjustment of the operation scheduling mode, thereby reducing the work intensity of maintenance personnel, improving the quality of maintenance, and comprehensively eliminating potential safety hazards in train operation.